#include <Motor.h>
Include dependency graph for Motor.cpp:
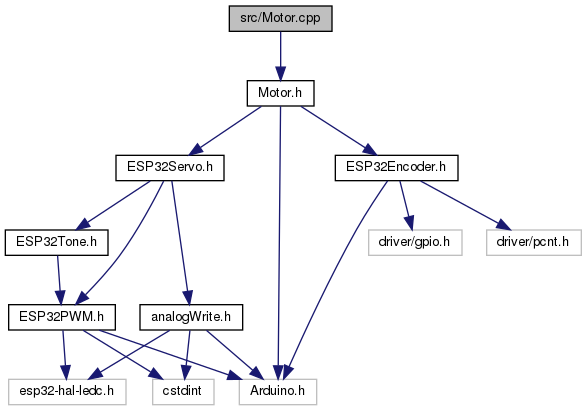
Go to the source code of this file.
Functions | |
| float | myFmapBounded (float x, float in_min, float in_max, float out_min, float out_max) |
| void | onMotorTimer (void *param) |
Variables | |
| static const char * | TAG = "Motor Class" |
| static TaskHandle_t | complexHandlerTask |
Function Documentation
◆ myFmapBounded()
| float myFmapBounded | ( | float | x, |
| float | in_min, | ||
| float | in_max, | ||
| float | out_min, | ||
| float | out_max | ||
| ) |
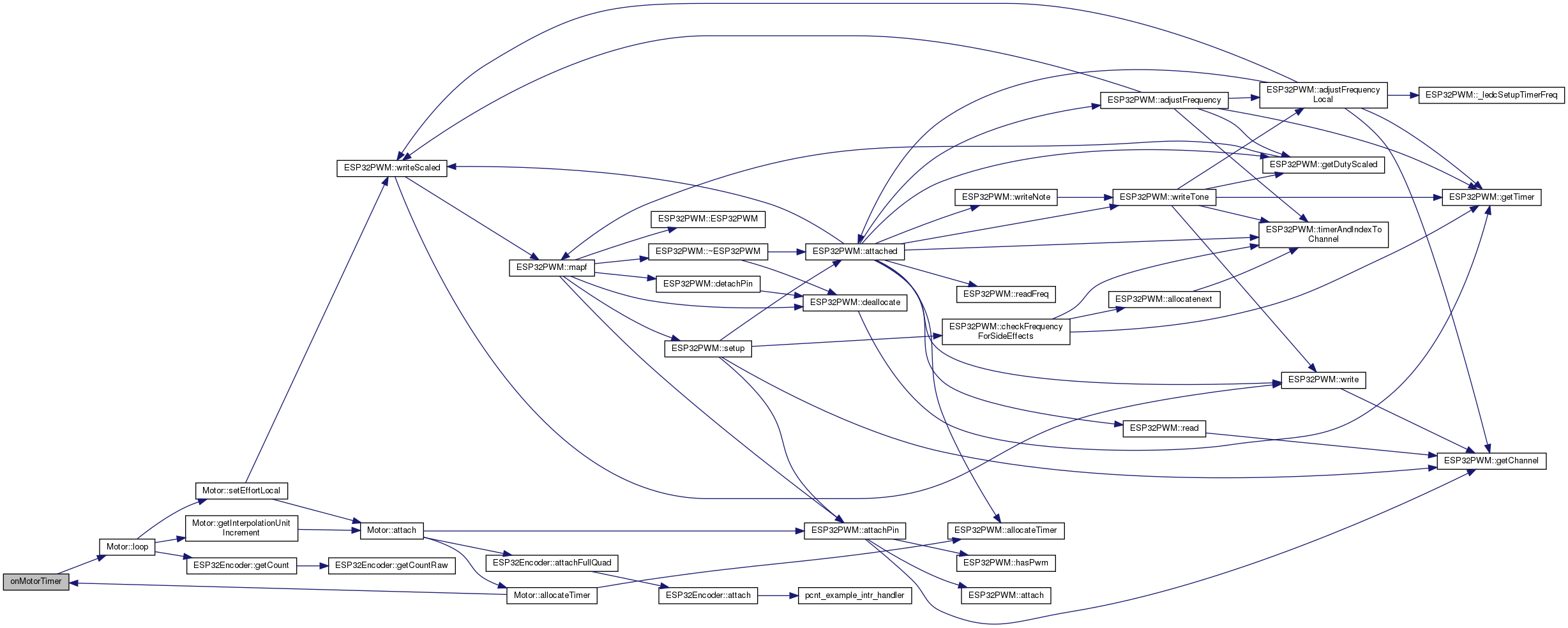
◆ onMotorTimer()
| void onMotorTimer | ( | void * | param | ) |
Definition at line 89 of file Motor.cpp.
References Motor::loop(), MAX_POSSIBLE_MOTORS, and TAG.
Referenced by Motor::allocateTimer().
Here is the call graph for this function:
Variable Documentation
◆ complexHandlerTask
|
static |
Definition at line 15 of file Motor.cpp.
Referenced by Motor::allocateTimer().
◆ TAG
|
static |
Definition at line 9 of file Motor.cpp.
Referenced by Motor::isMotorDoneWithMove(), onMotorTimer(), and Motor::setSetpointWithTime().
