#include <RBE1001Lib.h>#include "Motor.h"#include "Rangefinder.h"#include <ESP32Servo.h>#include <ESP32AnalogRead.h>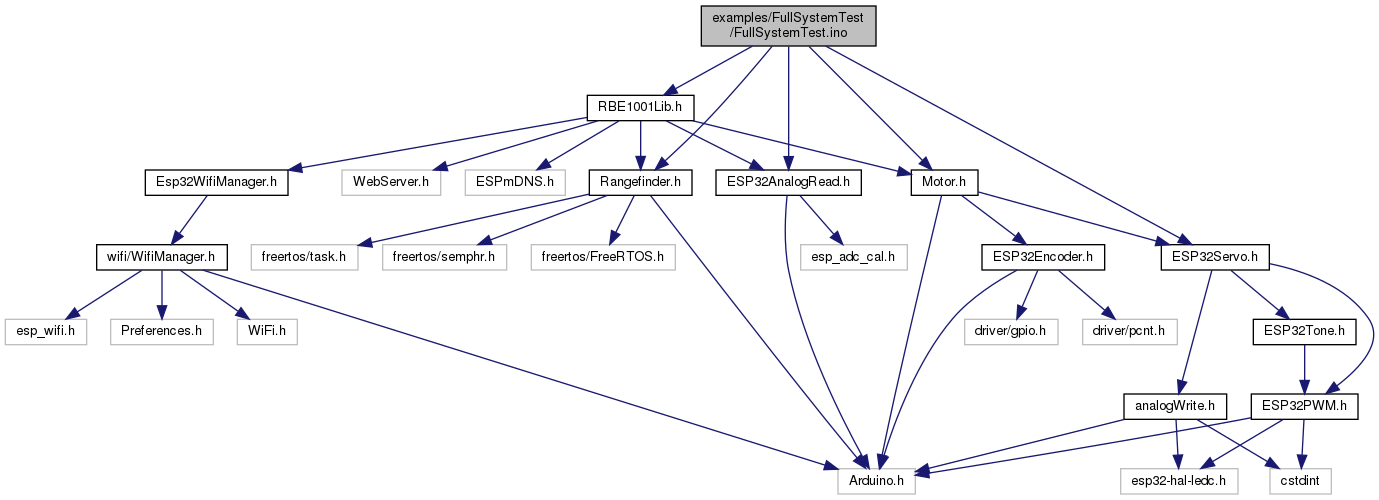
Go to the source code of this file.
Functions | |
| void | setup () |
| void | loop () |
Function Documentation
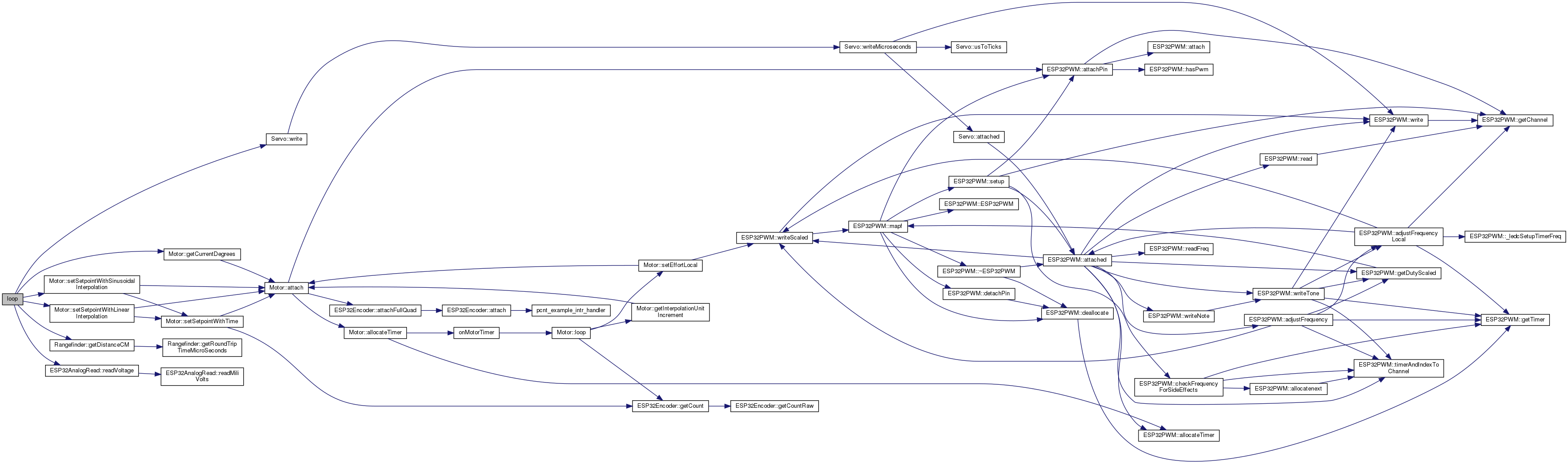
◆ loop()
| void loop | ( | ) |
Definition at line 38 of file FullSystemTest.ino.
References Motor::getCurrentDegrees(), Rangefinder::getDistanceCM(), ESP32AnalogRead::readVoltage(), Motor::setSetpointWithLinearInterpolation(), Motor::setSetpointWithSinusoidalInterpolation(), upDown, and Servo::write().
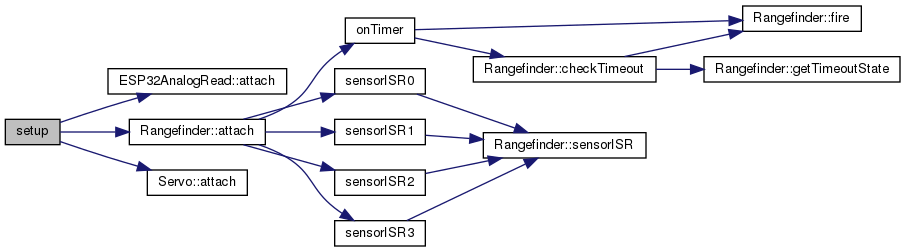
◆ setup()
| void setup | ( | ) |
Definition at line 22 of file FullSystemTest.ino.
References ESP32AnalogRead::attach(), Rangefinder::attach(), Servo::attach(), LEFT_LINE_SENSE, RIGHT_LINE_SENSE, SERVO_FEEDBACK_SENSOR, SERVO_PIN, SIDE_ULTRASONIC_ECHO, and SIDE_ULTRASONIC_TRIG.
Variable Documentation
◆ left_motor
| LeftMotor left_motor |
Definition at line 7 of file FullSystemTest.ino.
◆ leftLineSensor
| ESP32AnalogRead leftLineSensor |
Definition at line 14 of file FullSystemTest.ino.
◆ lifter
| Servo lifter |
Definition at line 12 of file FullSystemTest.ino.
◆ rangefinder1
| Rangefinder rangefinder1 |
Definition at line 10 of file FullSystemTest.ino.
◆ right_motor
| RightMotor right_motor |
Definition at line 8 of file FullSystemTest.ino.
◆ rightLineSensor
| ESP32AnalogRead rightLineSensor |
Definition at line 15 of file FullSystemTest.ino.
◆ servoPositionFeedback
| ESP32AnalogRead servoPositionFeedback |
Definition at line 16 of file FullSystemTest.ino.
◆ upDown
| bool upDown = false |
Definition at line 17 of file FullSystemTest.ino.
Referenced by loop().
