Include dependency graph for Motor.h:
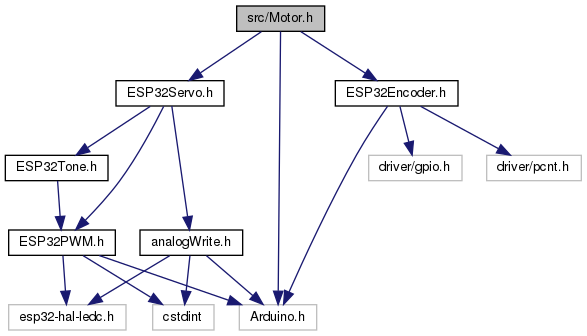
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Data Structures | |
| class | Motor |
| A PID Motor class using FreeRTOS threads, ESP32Encoder and ESP32PWM. More... | |
Macros | |
| #define | MAX_POSSIBLE_MOTORS 4 |
| #define | ENCODER_CPR 12.0f |
| #define | GEAR_BOX_RATIO 120.0f |
| #define | QUADRATUE_MULTIPLYER 1.0f |
| #define | TICKS_TO_DEGREES ((QUADRATUE_MULTIPLYER / (ENCODER_CPR * GEAR_BOX_RATIO / 360.0)) * -1) |
| #define | I_TERM_SIZE 120.0f |
Enumerations | |
| enum | interpolateMode { LINEAR_INTERPOLATION = 1, SINUSOIDAL_INTERPOLATION = 2, VELOCITY_MODE = 3, BEZIER = 4, TRAPEZOIDAL = 5 } |
Variables | |
| const float | DELTA_EFFORT = 0.0025 |
Macro Definition Documentation
◆ ENCODER_CPR
◆ GEAR_BOX_RATIO
◆ I_TERM_SIZE
| #define I_TERM_SIZE 120.0f |
Definition at line 18 of file Motor.h.
Referenced by Motor::loop().
◆ MAX_POSSIBLE_MOTORS
| #define MAX_POSSIBLE_MOTORS 4 |
Definition at line 13 of file Motor.h.
Referenced by Motor::attach(), WebPage::initalize(), onMotorTimer(), WebPage::SendPIDValues(), WebPage::SendSetpoint(), WebPage::UpdatePIDValues(), WebPage::UpdateSetpoint(), and updateTask().
◆ QUADRATUE_MULTIPLYER
◆ TICKS_TO_DEGREES
| #define TICKS_TO_DEGREES ((QUADRATUE_MULTIPLYER / (ENCODER_CPR * GEAR_BOX_RATIO / 360.0)) * -1) |
Definition at line 17 of file Motor.h.
Referenced by Motor::getCurrentDegrees(), Motor::getDegreesPerSecond(), Motor::isMotorDoneWithMove(), Motor::setSetpointWithTime(), and Motor::setSpeed().
Enumeration Type Documentation
◆ interpolateMode
| enum interpolateMode |
Variable Documentation
◆ DELTA_EFFORT
| const float DELTA_EFFORT = 0.0025 |
Definition at line 20 of file Motor.h.
Referenced by Motor::loop().
