#include <Arduino.h>#include <RBE1001Lib.h>#include "Motor.h"#include "Rangefinder.h"#include <ESP32Servo.h>#include <ESP32AnalogRead.h>#include <Esp32WifiManager.h>#include "wifi/WifiManager.h"#include "WebPage.h"#include <Timer.h>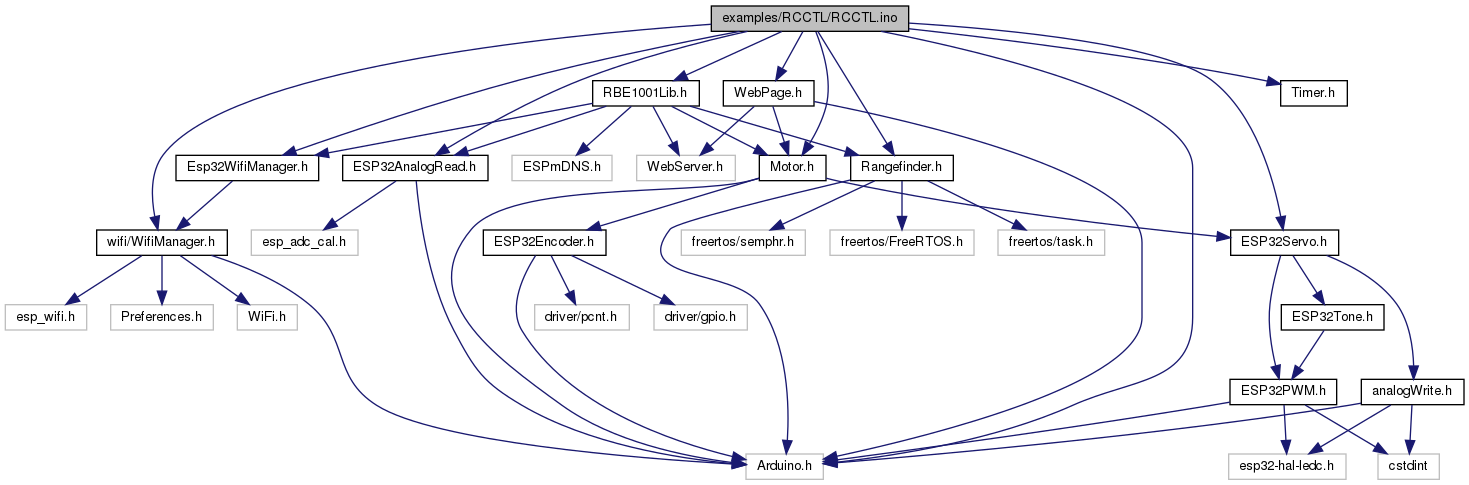
Go to the source code of this file.
Functions | |
| void | setup () |
| void | runStateMachine () |
| void | updateDashboard () |
| void | loop () |
Function Documentation
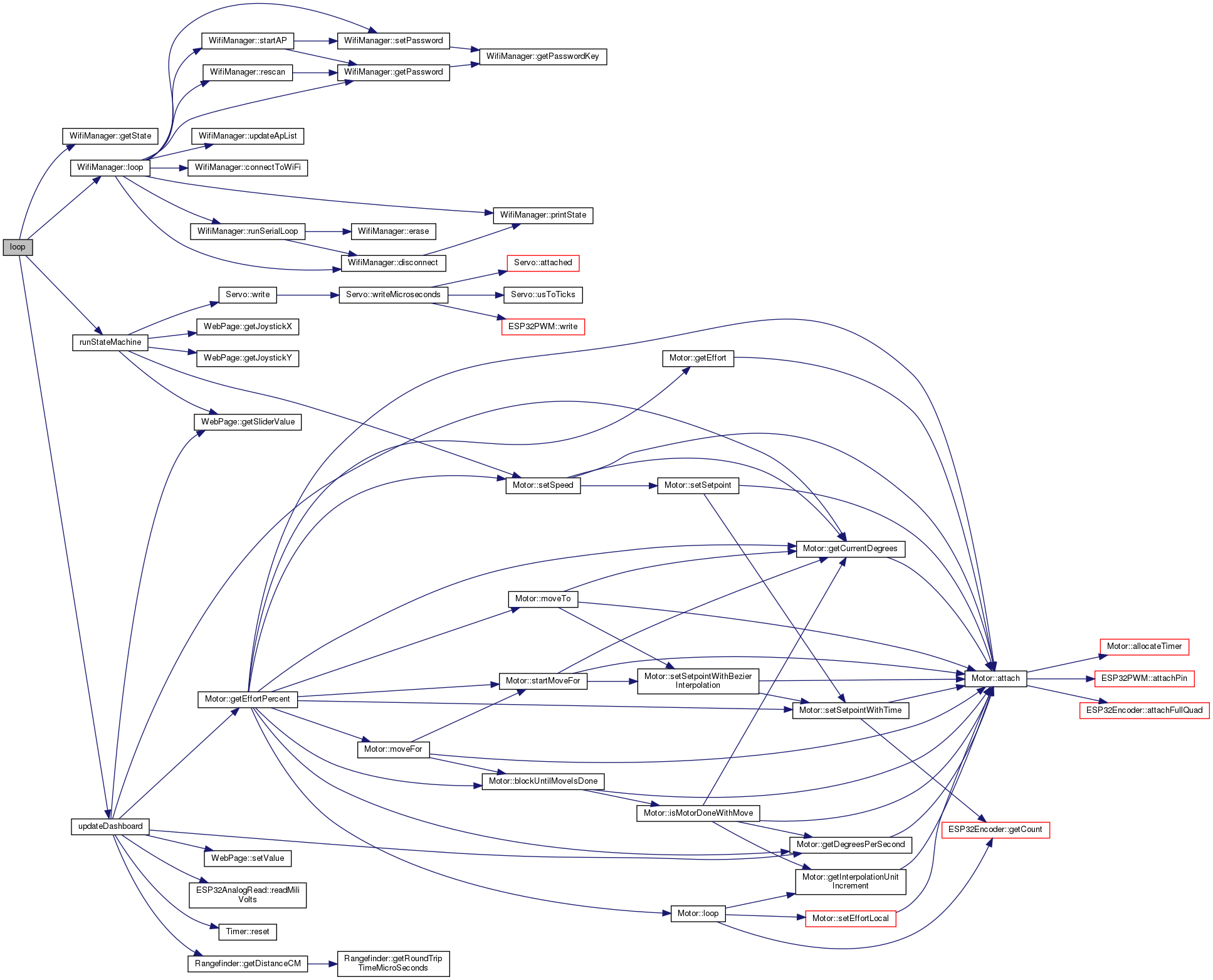
◆ loop()
| void loop | ( | ) |
Definition at line 171 of file RCCTL.ino.
References Connected, WifiManager::getState(), WifiManager::loop(), runStateMachine(), and updateDashboard().
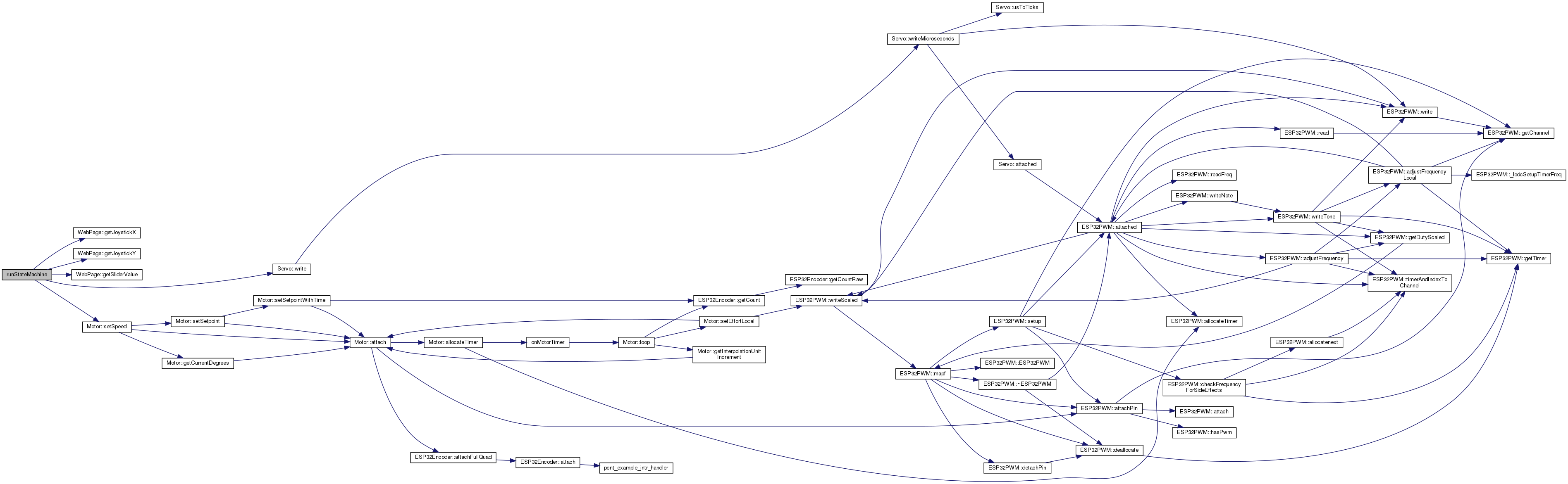
◆ runStateMachine()
| void runStateMachine | ( | ) |
Definition at line 99 of file RCCTL.ino.
References WebPage::getJoystickX(), WebPage::getJoystickY(), WebPage::getSliderValue(), Motor::setSpeed(), and Servo::write().
Referenced by loop().
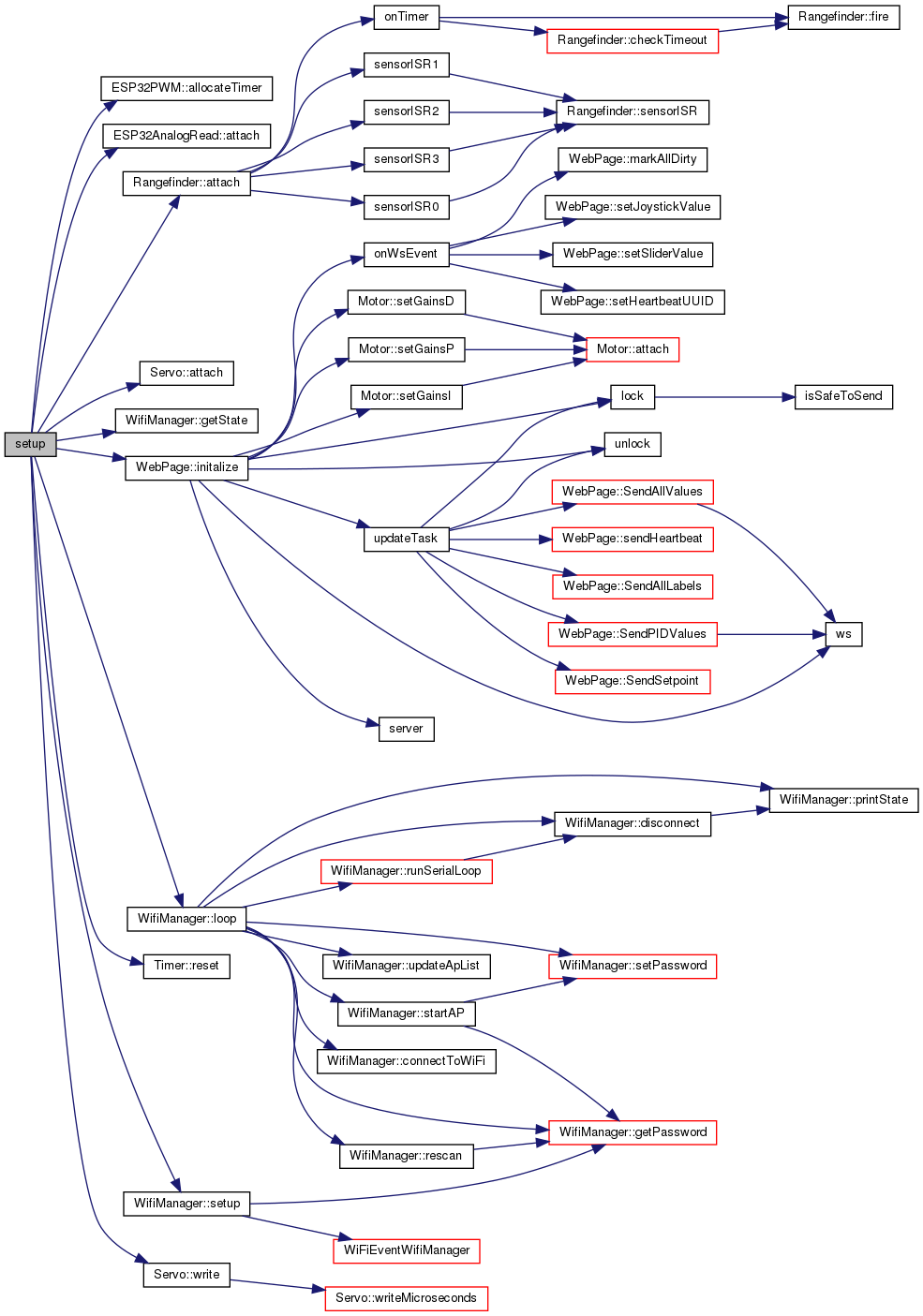
◆ setup()
| void setup | ( | ) |
Definition at line 69 of file RCCTL.ino.
References ESP32PWM::allocateTimer(), ESP32AnalogRead::attach(), Rangefinder::attach(), Servo::attach(), Connected, WifiManager::getState(), WebPage::initalize(), LEFT_LINE_SENSE, WifiManager::loop(), Timer::reset(), RIGHT_LINE_SENSE, SERVO_FEEDBACK_SENSOR, SERVO_PIN, WifiManager::setup(), SIDE_ULTRASONIC_ECHO, SIDE_ULTRASONIC_TRIG, and Servo::write().
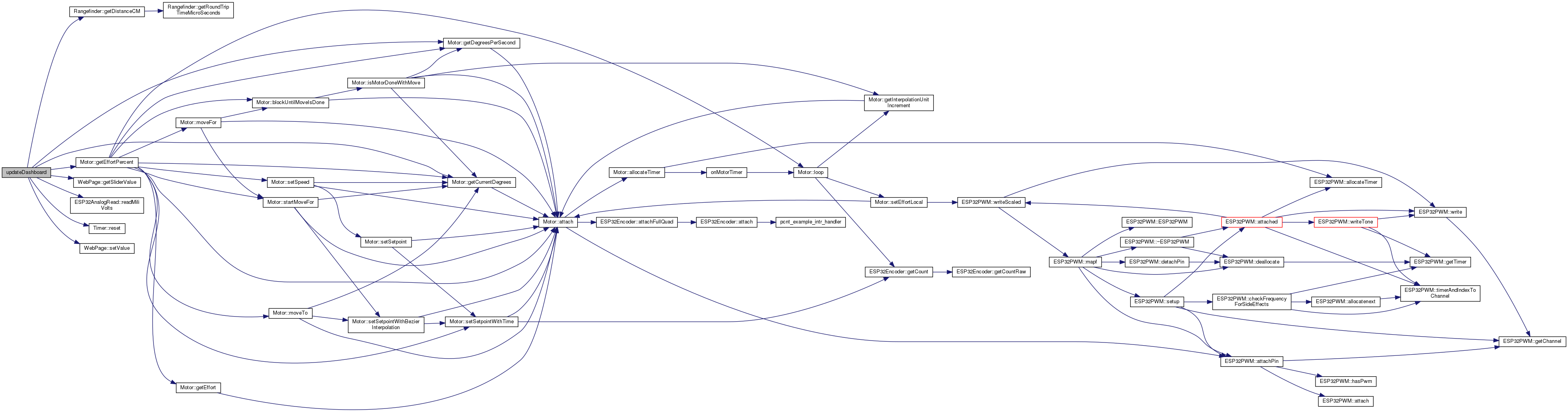
◆ updateDashboard()
| void updateDashboard | ( | ) |
Definition at line 118 of file RCCTL.ino.
References Motor::getCurrentDegrees(), Motor::getDegreesPerSecond(), Rangefinder::getDistanceCM(), Motor::getEffortPercent(), WebPage::getSliderValue(), inc, ESP32AnalogRead::readMiliVolts(), Timer::reset(), WebPage::rxPacketCount, WebPage::setValue(), and WebPage::txPacketCount.
Referenced by loop().
Variable Documentation
◆ control_page
◆ dashboardUpdateTimer
◆ inc
| int inc = 0 |
Definition at line 68 of file RCCTL.ino.
Referenced by updateDashboard().
◆ left_motor
◆ leftLineSensor
| ESP32AnalogRead leftLineSensor |
◆ lifter
◆ manager
| WifiManager manager |
◆ packet_old
◆ rangefinder1
| Rangefinder rangefinder1 |
◆ right_motor
| RightMotor right_motor |
◆ rightLineSensor
| ESP32AnalogRead rightLineSensor |
◆ servoPositionFeedback
| ESP32AnalogRead servoPositionFeedback |
